About
I'm a PhD student at the University of Southern California in the Computational Learning and Motor Control Lab (CLMC) under supervision of Prof. Stefan Schaal. I'm also closely collaborating with Gaurav Sukhatme's group at USC and Dr. Oliver Kroemer at the The Robotics Institute Carnegie Mellon University. My research has focused on using haptic sensing, including tactile and force sensing, for autonomous manipulation by leveraging machine learning techniques, such as supervised, unsupervised, and reinforcement learning.
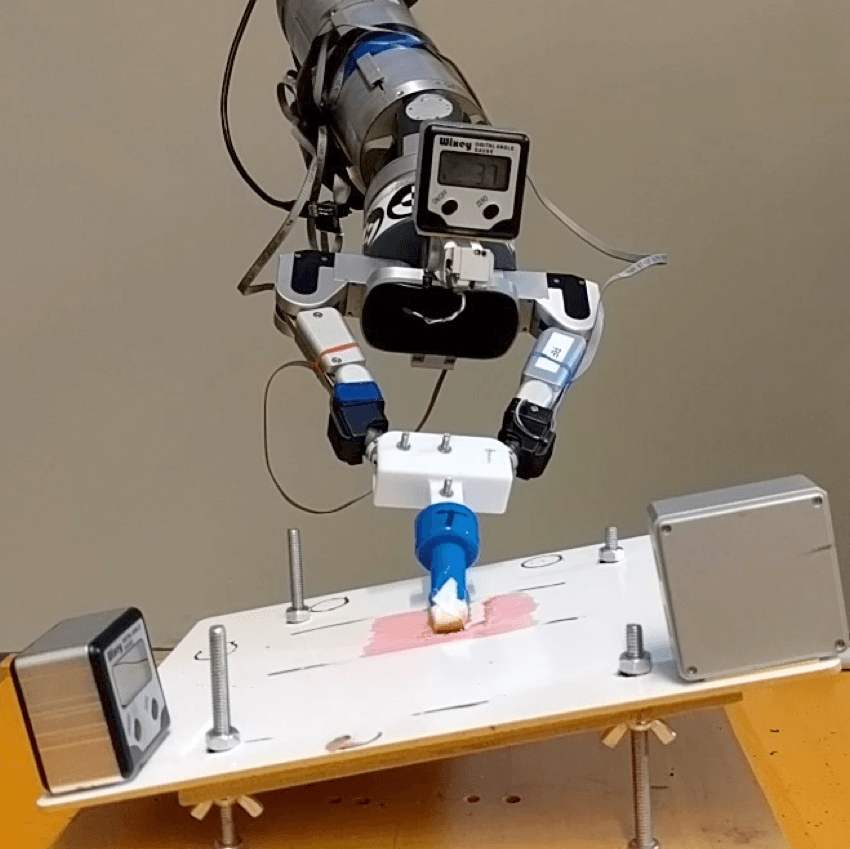
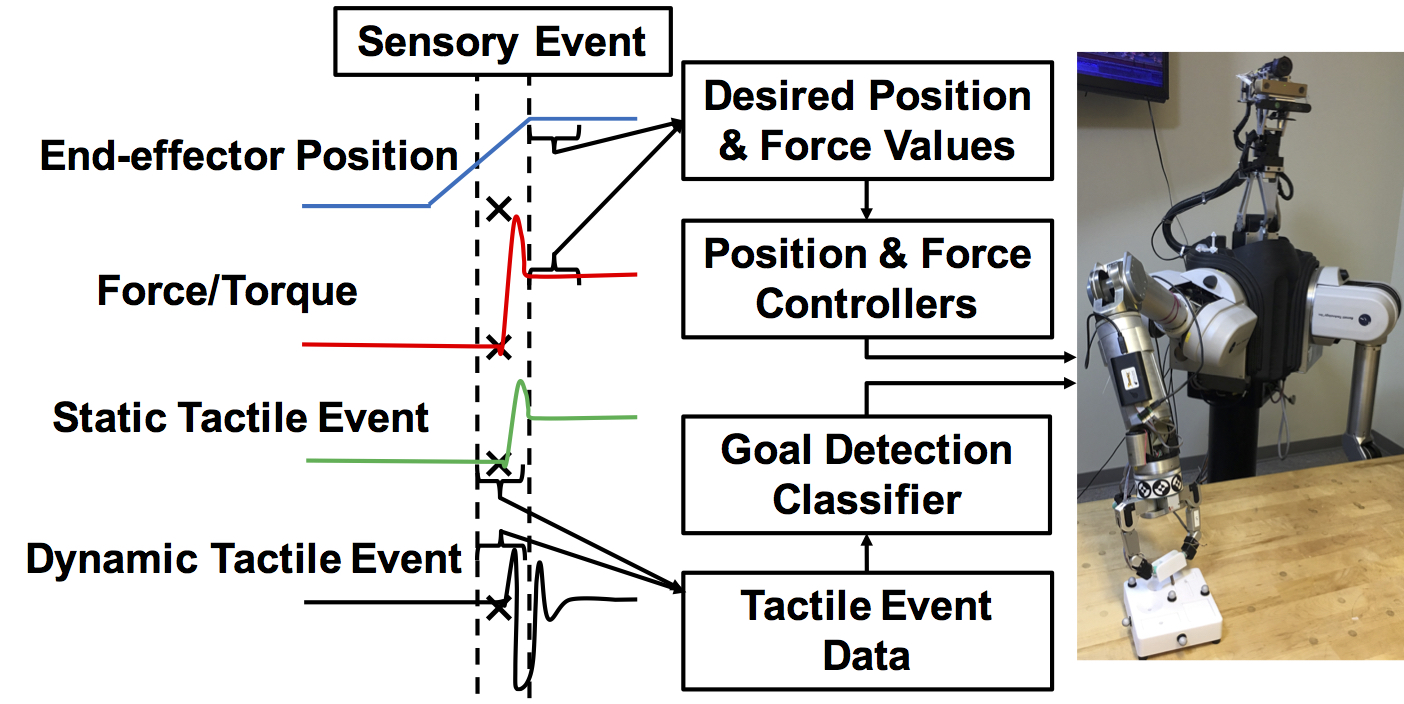
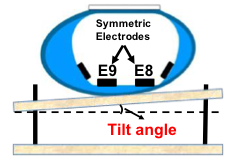
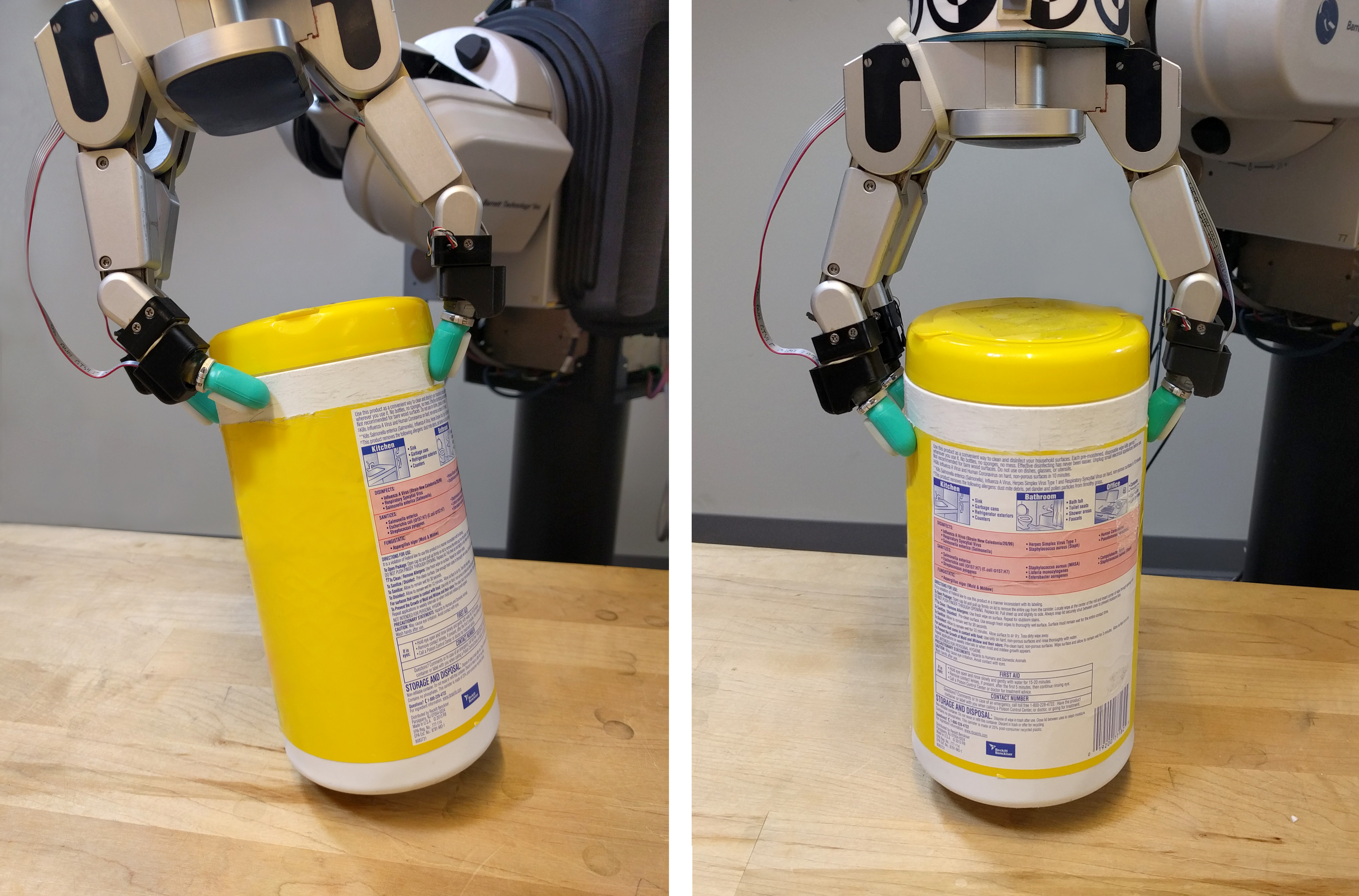
My research interests lie in integrating sensory signals to different levels of planning and control for autonomous manipulation tasks by leveraging machine learning techniques. I investigated tactile servoing where robots directly adapt actions at the rate of perception while gaining better perceptual information. I also worked on learning reactive policies using deep learning techniques, which map erroneous sensory inputs and corrective actions to cope with unconstructed environment. More recently, I have been investigating learning predictive models which update feedforward models based on current sensory inputs. I have evaluated these work on a bimanual manipulation platforms equipped with various sensors. In addition to software development, I also lead in maintaining, debugging, fixing, and upgrading the electrical and mechanical aspects of the robot platform.
Before joining CLMC, I studied Biomedical/Electrical Engineering at Shenyang University of Technology (SUT) and Biomedical Engineering at University of Southern California (USC) under the supervision of Prof. Gerald E. Loeb in the Medical Device Development Facility (MDDF). In July 2008, I obtained Bachelor of Engineering degree at SUT. In May 2011, I graduated with Master of Biomedical Engineering degree from USC.
When I’m not working on research, I try to spend most of my time outdoors either hiking or training my dog to become an agility and a search and rescue dog.